Présentation des modes
PhotoLab propose cinq algorithmes de réduction du bruit.
La fonction s’appelle « DxO Denoising Technologies » (sic).
* Haute Qualité, traitement du bruit conventionnel à régler manuellement lors du post traitement des images bitmap (JPEG généralement)
* HQ (rapide) est un traitement très performant à appliquer par défaut sur les photos raw
La fenêtre de l’aperçu de PhotoLab (la fenêtre principale qui présente les corrections) inclut le traitement HQ en permanence
* PRIME (Probabilistic Raw IMage Enhancement) est reconnu pour préserver les détails et les couleurs. Il redonne de la profondeur aux zones d’ombres débouchées. Son application est bluffante sur des photos prises avec des appareils photos âgés..
* DeepPRIME est plus subtil que PRIME. Cet algorithme amélioré préserve mieux le rendu des couleurs, qu’elles soient ternes ou saturées et rehausse les micros détails
* La nouvelle fonctionnalité de débruitage: DeepPRIME XD, version « eXtra Details », offre un niveau de détail et des capacités de débruitage améliorés
DxO a inclus les réseaux de neurones de l’intelligence artificielle (Deep Learning), d’où le Deep adjoint à l’acronyme PRIME, pour reconstruire les détails perdus.
DxO communique: Nous avons soumis notre système à la lecture de millions d’images produites lors des tests au fil des années dans une approche holistique, l’analyse de l’image dans sa globalité. »
DeepPRIME remplace PRIME, il exige une bonne machine.
Utiliser alternativement les deux versions n’a pas de sens.L’accès à PRIME est conservé pour les utilisateurs n’ayant pas la ressource matérielle suffisante.
En revanche l’utilisation systématique de DeepPRIME XD n’est pas recommandée.

PRIME et ses variantes sont disponibles avec l’édition Elite de PhotoLab.
Qu’est ce que le bruit numérique ?
Voir le tutoriel Débuter avec PhotoLab – La Réduction du bruit
Choix du mode
Il est recommandé de laisser la réduction du bruit HQ (rapide) active en permanence. Le logiciel divise l’image par zones selon leur densité. Il les traitera au plus juste du besoin selon les caractéristiques du boitier, la sensibilité ISO et la luminance, voire n’appliquera pas de réduction du bruit du tout.
Dans ses deux versions DeepPRIME appelle son propre algorithme de dématriçage qui s’avère produire des images plus détaillées.
Ce peut être une bonne idée de traiter systématiquement avec DeepPRIME toutes les photos à ISO élevés ainsi que celles pour lesquelles on a prévu de remonter les ombres.
– Pour les scènes à grande dynamique lumineuse, DeepPRIME nettoie les ombres en préservant les couleurs
– Les scènes (très) sombres sont par nature défavorables aux couleurs. DeepPRIME les préserve mais ne fait pas de miracle si les couleurs sont trop rabattues
A contrario DeepPRIME peut rehausser des défauts de peau (points, taches de rousseurs, …). Utiliser un masque de Réglage Local de microContraste négatif.
Avec PRIME certains utilisateurs observent des couleurs moins vives.
DeepPRIME supprime les pixels qu’il considère comme parasites, il se rapproche de la nuance estimée la plus probable. L’erreur dans le raisonnement est de considérer le résultat du traitement du bruit HQ comme étant la référence.
DeepPrime convient à la plupart des cas.
Réserver DeepPrime XD lorsqu’il est nécessaire de faire ressortir les détails et structures les plus fines pour les impressions grand formats.
DeepPrime XD est aussi très indiqué sur les photos fortement recadrées.
DeepPRIME XD doit parfois être affiné pour en tirer le meilleur parti.
– Le curseur Modèle de bruit (Détail) applique un adoucissement ou une netteté supplémentaire à l’image. ATTENTION aux artefacts. La valeur 0 est à privilégier par défaut
– Le curseur de Luminance permet de définir le niveau de lissage du grain
– La valeur auto du curseur pixels morts augmente pour les temps de pose très longs (> 1s). Sinon elle est unique pour tous les boitiers, à toutes les valeurs ISO
– La baguette magique réinitialise les valeurs recommandées
DeepPRIME XD améliore le MicroContraste dans les détails fins sans aucun artefact de netteté notable, mais peut également inventer de la structure. Aussi performant soit-il, DeepPRIME XD n’est pas bon pour toutes les images. Même si l’image DeepPRIME est plus bruyante, elle demeure souvent plus naturelle.
DxO indique:
Tous nos algorithmes de réduction du bruit (HQ, PRIME, DeepPRIME et DeepPRIME XD) sont calibrés pour chaque boîtier. Ceci implique pour nous la connaissance de la quantité de bruit à attendre à une sensibilité ISO donnée. Ainsi, la quantité de débruitage appliquée s’adapte réellement à chaque image.
Ce calibrage est assez précis pour deepPRIME, mais pour la version XD ce n’est pas tout à fait le cas. C’est pourquoi nous préférons laisser le choix à l’utilisateur d’intervenir avec le curseur « Détails ».
Idéalement, la valeur de débruitage « par défaut » devrait être automatiquement estimée à la volée en fonction de l’image afin d’éviter de peaufiner chaque image indépendamment.
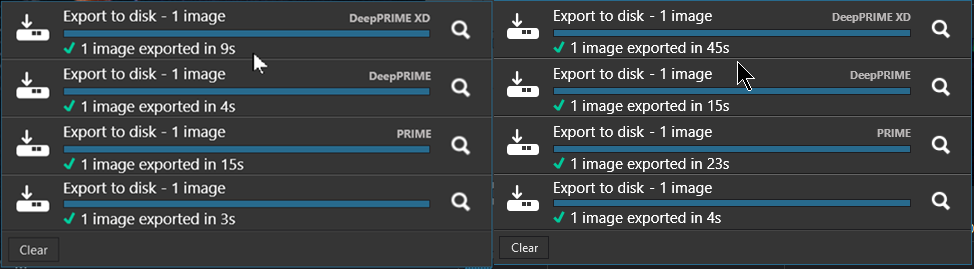
Performances
DeepPRIME nécessite une configuration musclée avec une carte graphique compatible (GPU). Le transfert de la charge de dématriçage sur le GPU libère le processeur (CPU) pour continuer à travailler sur une machine stable.
Les temps d’exportation risquent d’être très longs sans GPU compatible.
Ce choix est établi par DxO au premier lancement de PhotoLab.
Le menu Edition / Préférences – Performances – Sélection entre le CPU ou la Carte Graphique sert à neutraliser ou forcer l’activation (ça vaut le coup d’essayer) des cartes graphiques non compatibles. Sinon le laisser sur Auto.
DxO indique:
Si selon l’option Auto votre machine n’utilise pas le GPU,
En le forçant, dans le meilleur des cas, l’exportation échoue et PhotoLab vous en informe.
Dans le pire des cas, si l’exportation consomme toutes les ressources GPU et gèle l’affichage pendant plus de 3 secondes, le système redémarre le GPU et peut planter.
Pour éviter cette expérience très désagréable nous faisons un choix plutôt conservateur en ne considérant pas du matériel potentiellement apte.
Voici une astuce pour les utilisateurs avec une machine peu puissante.
– Exporter pendant la nuit avec l’option “Exporter en DNG avec corrections optiques et DeepPrime”
– Développer ensuite ces photos DNG en bénéficiant du traitement du bruit réalisé (affichage permanent)
Voir le tutoriel Maitrise de PhotoLab – Exporter en DNG
Les traitements PRIME consomment beaucoup de ressources, il n’est pas possible d’afficher leur effet en permanence.
L’action est prévisualisée dans une vignette dont on peut déplacer la cadre de sélection.
Attention. L’affichage permanent de cette vignette d’aperçu peut ralentir le système.
Fermer l’outil « DxO Denoising Technologies »

Résultats
Lors de l’exportation de l’image, la réduction du bruit est réalisée au tout début du processus de développement, avant même le dématriçage. Celui-ci s’effectue dans de meilleures conditions et le résultat est d’emblée plus précis.
Contrairement aux logiciels concurrents dont les algorithmes de réduction du bruit dégradent l’image, les corrections de Netteté de l’optique et microContraste sont réalisées sur une meilleure base.
Sur des images particulièrement sales la taille du fichier de sortie diminue à mesure que les performances de réduction du bruit augmentent.
Ce qui pourrait être interprété comme une perte de détails, est en fait l’illustration d’une image débarrassée d’artefacts.
Pour indication, voici la taille des différents fichiers de la même image JPEG.
| NR off | HQ | PRIME | DeepPRIME | DeepPRIME XD |
| 6.4 Mo | 2.7 Mo | 2.2 Mo | 1.6 Mo | 1.3 Mo |
Voir le tutoriel S’approprier son image – Réduction du bruit
Il est possible de filtrer les vignettes des images selon le qualité de réduction de bruit utilisée.
Voir le tutoriel Gestion des photos – Filtrer l’affichage des photos

Faisons une parenthèse (lecture facultative) pour revenir sur le fonctionnement du capteur, comment il collecte la lumière et pourquoi il en résulte du bruit.
Nous synthétisons les différents concepts fondamentaux de la photographie dans un exposé commun.Chaque photosite du capteur (définissant chacun un pixel) capte des photons. L’exposition est déterminée pour qu’ils en recueillent juste assez avant saturation, l’écrêtage. Ainsi certains photosites sont remplis selon la capacité d’exposition maximale et d’autres moins. On classe le résultat de cette captation en zones lumineuses suivant des fractions (½, ¼, etc.) définissant la plage tonale de la photo.
La conséquence mathématique implique que chaque zone reçoit moitié moins de photons que la précédente et, par conséquent, contient deux fois moins d’informations. Les détails les plus subtils des zones lumineuses sont restitués alors que la définition des zones sombres se résume à des variations de teintes.Le nombre maximum de zones, du blanc au noir, dépend de la profondeur de bit du capteur (généralement 12 bits, 14 pour certains appareils photos). L’information captée sur 12 bits est répartie en 12 zones d’Indice de Luminance (IL) différents.
La première contient la moitié de toutes les nuances possibles, soit 212 / 2 (4096 / 2). La seconde contient la moitié du reste et ainsi de suite.
Zones IL 1 2 3 4 5 6 7 8 9 10 11 12 Nb nuances 2048 1024 512 256 128 64 32 16 8 4 2 1 La plage dynamique de la scène photographiée est divisée en 12 fractions égales mais la plage tonale enregistrée dans la première zone est exprimée selon 2048 nuances lumineuses et la dernière (2048 fois moins lumineuse) est exprimée selon une nuance; « entre presque noire et deux fois plus presque noire« . Les zones d’encore plus faible luminosité ne sont plus enregistrées et donnent toutes des pixels noirs.
Noter qu’en sous-exposant à la prise de vue, le photographe se prive des meilleures plages de définition de son appareil photo. Une technique d’optimisation consiste à exposer à droite.Le seul contrôle que le photographe peut exercer est d’augmenter la sensibilité ISO. Le tableau précédent n’est correct que pour la sensibilité native du capteur (généralement 100 ISO mais tendant vers 200 ISO sur les appareils photos modernes).
Concrètement; augmenter la sensibilité ISO revient à sous-exposer la photo.Pour pallier ce manque d’information, des circuits électroniques du capteur amplifient le signal électrique reçu des photosites les moins garnis en photons. Cette amplification, soumise aux lois du rapport signal / bruit, crée du bruit de plus en plus visible de façon exponentielle selon l’élévation du dénominateur des fractions d’indice lumineux (*). Le but est de conserver un maximum de détails dans les ombres mais au prix d’une approximation des nuances lumineuses de plus en plus importante.
Le lecteur technophile a déjà compris; le capteur dit ”numérique” d’un appareil photo est principalement un circuit électronique analogique dont le dernier étage est un encodeur numérique.La rigueur mathématique du codage numérique s’accommode mal des approximations générées, deux pixels voisins définis selon deux nuances différentes seront plus discriminés dans la photo que dans la réalité. D’autres causes comme le bruit thermique des poses longues, conjugués à la perte de définition naturelle d’une scène peu éclairée, entraînent le parasitage de l’image.
(*) Chaque modèle d’appareil photo a sa recette pour offrir la meilleure définition possible en situation d’éclairage faible.
A propos de la première version de l’algorithme PRIME:
La puissance recommandée (par la baguette magique) de la Luminance estompe trop de détails. Mon préréglage perso de départ, « 0 – Standard », est configuré à 30 qui atténue encore efficacement le grain fin.
Noter que la valeur de luminance 0 enlève quand même du bruit.
Le réglage de labyrinthe (artefact Maze) de PRIME agit en contrecarrant le phénomène qui peut apparaître sur la trame d’une image d’une fréquence différente de celle des pixels du capteur de l’appareil photo.
Les versions précédentes de DxO Optics Pro le traitaient automatiquement mais au prix d’une acutance générale amoindrie des détails pour lutter contre un phénomène marginal.
Voir <ici>
TuToDxO.com – All rights reserved – tous droits réservés.